製品と技術
標準型ロボット
機能型ロボット
背負式ロボット
伝送式ロボット
フォークリフトロボット
牽引式ロボット
エンボディドロボット
DARWIN
LINK
RoboVerse
コア テクノロジー
ソリューション
コンシューマエレクトロニクス、コンピュータ、通信
自動車
半導体
新エネルギー
バイオ医薬
その他の業界
ニュースとメディア
ニュース
ブログ
イベント
サポート
サービス
ダウンロード
パートナー
会社概要
会社プロフィール
企業文化
開発歴史
業績
お問い合わせ
中文
EN
日文
製品と技術
標準型ロボット
機能型ロボット
背負式ロボット
伝送式ロボット
フォークリフトロボット
牽引式ロボット
エンボディドロボット
DARWIN
LINK
RoboVerse
コア テクノロジー
ソリューション
コンシューマエレクトロニクス、コンピュータ、通信
自動車
半導体
新エネルギー
バイオ医薬
その他の業界
ニュースとメディア
ニュース
ブログ
イベント
サポート
サービス
ダウンロード
パートナー
会社概要
会社プロフィール
企業文化
開発歴史
業績
お問い合わせ
中文
EN
日文
言語
限界を超え、ニーズに応じて変化
DARWIN
エンボディドインテリジェンスで産業製造をリード
ホーム
Products
エンボディドロボット
DARWIN
DARWIN
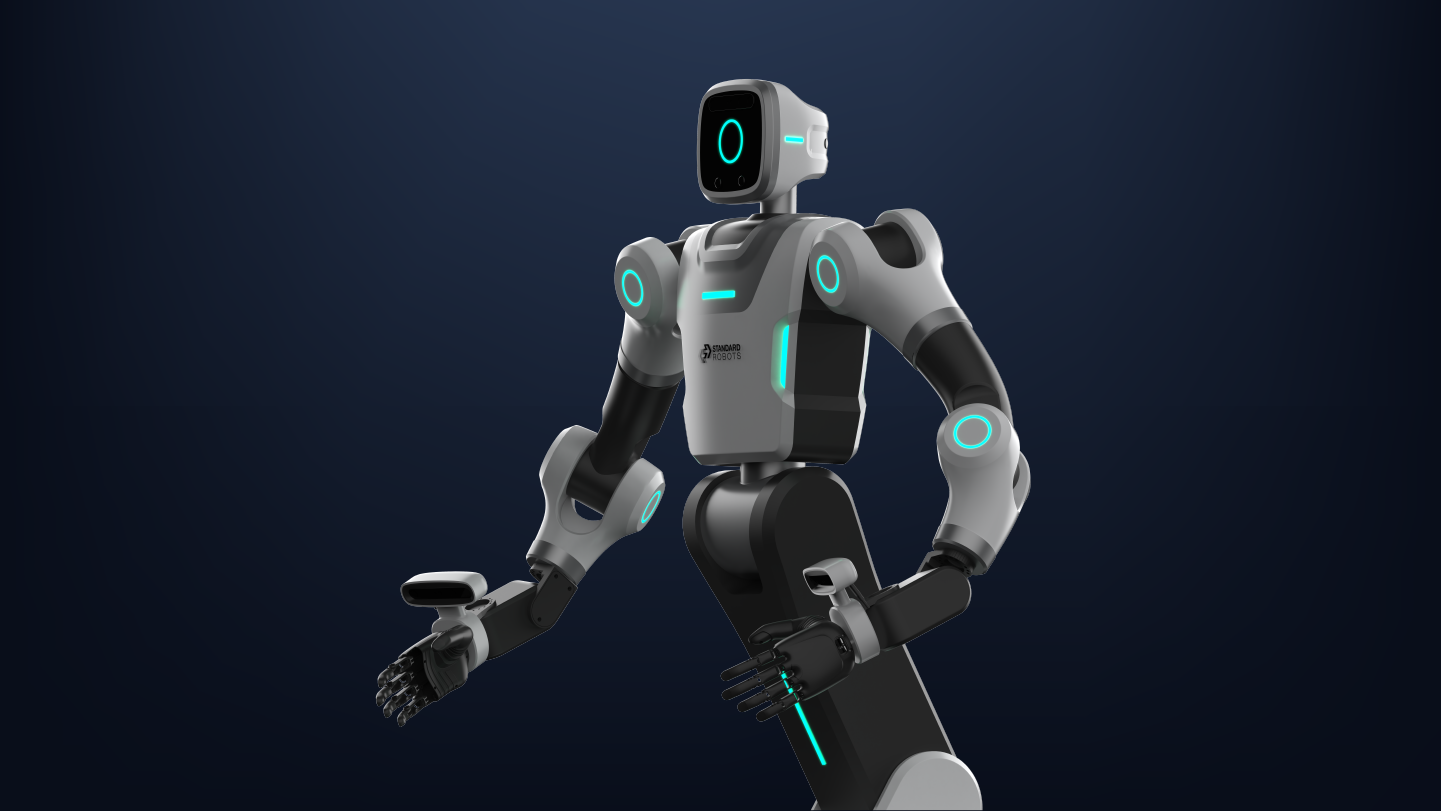
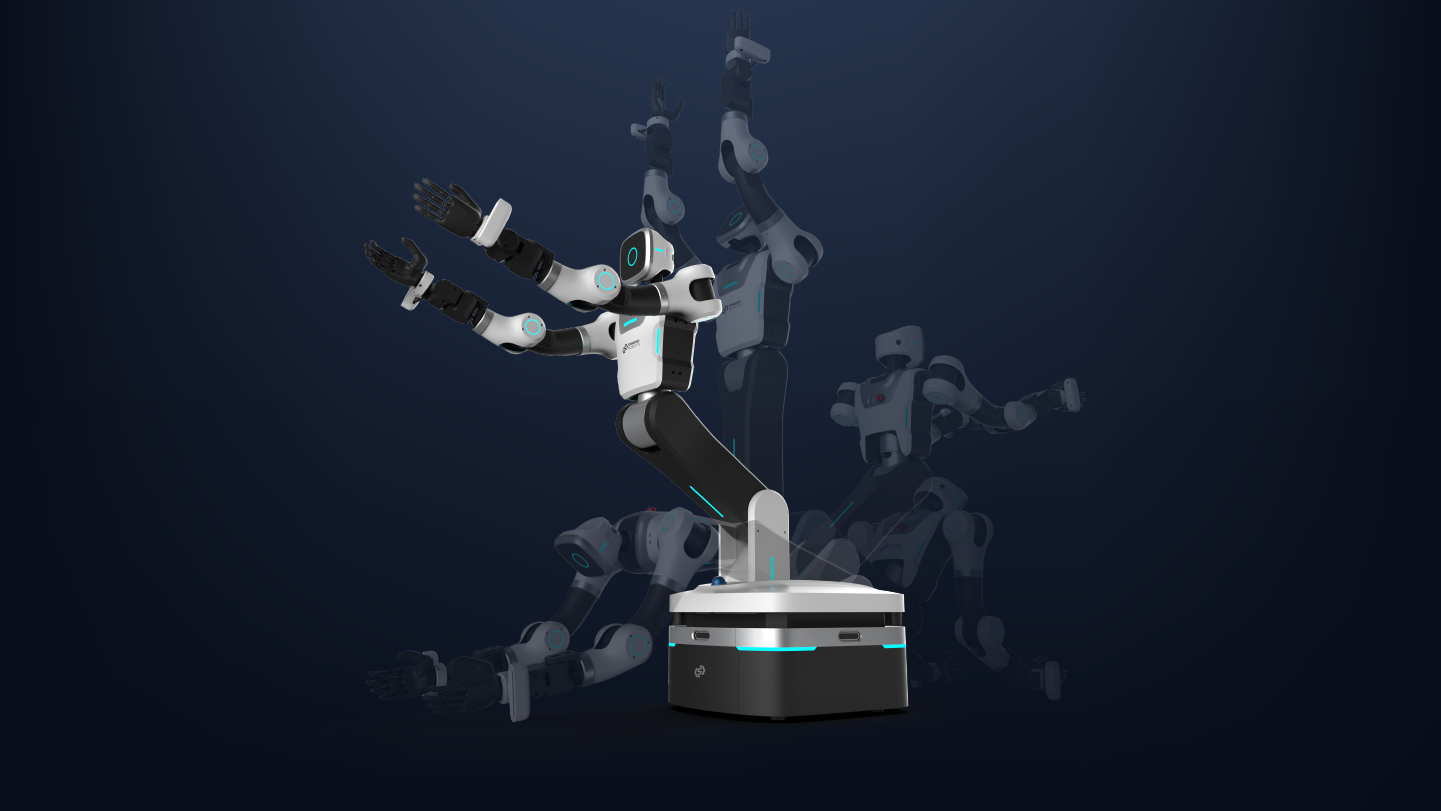
DARWINは、産業用エンボディドインテリジェントロボットへの重要な一歩を踏み出したことを示します。DARWINは両腕を装備した車輪型ヒューマノイドロボットであり、単一アームの操作制限を打破し、複数のハンド状エンドエフェクタを介してより複雑な作業を完了し、非常に高い自由度を実現します。これらの特徴により、DARWINはより広い作業範囲をカバーでき、高所作業エリアや狭い空間でも対応可能です。その柔軟な折りたたみ能力は、しゃがみ姿勢と立ち姿勢のシームレスな切り替えをサポートし、さまざまな高さや複雑な操作要求に適応します。クイックチェンジ精巧ハンドシステムを装備し、異なるハンド状エンドエフェクタを素早く切り替え、重量物輸送から小型部品の微細操作まで多様なタスクを効率的に処理できます。
DARWIN
DARWIN
エンボディドロボットDARWIN、産業シーンの境界を打ち破るために生まれました。 DARWIN-01はスタンダードの最先端技術応用の体現です。多拡張性、多自由度、マルチモーダル知覚ネットワーク、全方向移動シャーシ、遠隔操縁などの特性を備え、人間に近いタスクを実行可能、産業シーンにおける人と機械の境界をさらに打破します。
最大速度
1.5 m/s
連続稼働時間
8 Hours
負荷容量
10kg
サイズ(直立します)
680×640×1736mm
作業範囲です
>1900mm
産業シーンの境界を打破する
多拡張性、多自由度
人手のように器用、多様な作業条件にも余裕で対応
折りたたみ可能なボディ、輸送に便利、迅速な導入
マルチモーダル知覚ネットワーク、立体環境認識
ボディに搭載された多種センサーマトリクスが360°x360°で作業環境を動的に知覚
立体安全知覚ネットワークを構築
広い作業範囲、全域に簡単に到達
とても自由な関節、柔軟な折りたたみ、しゃがみ/立ちのデュアル形態
両腕協調作業で最大10KGの負荷容量、あらゆるタスクを容易に満たす
関連するダウンロード
ダウンロード
製品と技術
標準型ロボット
機能型ロボット
エンボディドロボット
RoboVerse
コア テクノロジー
ソリューション
コンシューマエレクトロニクス、コンピュータ、通信
自動車
半導体
新エネルギー
バイオ医薬
その他の業界
ニュースとメディア
ニュース
ブログ
イベント
サポート
サービス
ダウンロード
パートナー
会社概要
会社プロフィール
企業文化
開発歴史
業績
一緒に話し合いましょう.
標準ロボットの専門家に連絡してくださいあなたに最も適したソリューション.
今日から始める
ニュースレターへのサインアップ
購読する
クッキーポリシー
|
プライバシーポリシー
|
利用規約













 ダウンロード
ダウンロード




